1.10.1

Выпущена
Новые функции:
1. Библиотека CAN обновлена до версии 4.4.0
2. Расширены возможности статусного выхода
- Три независимых функции
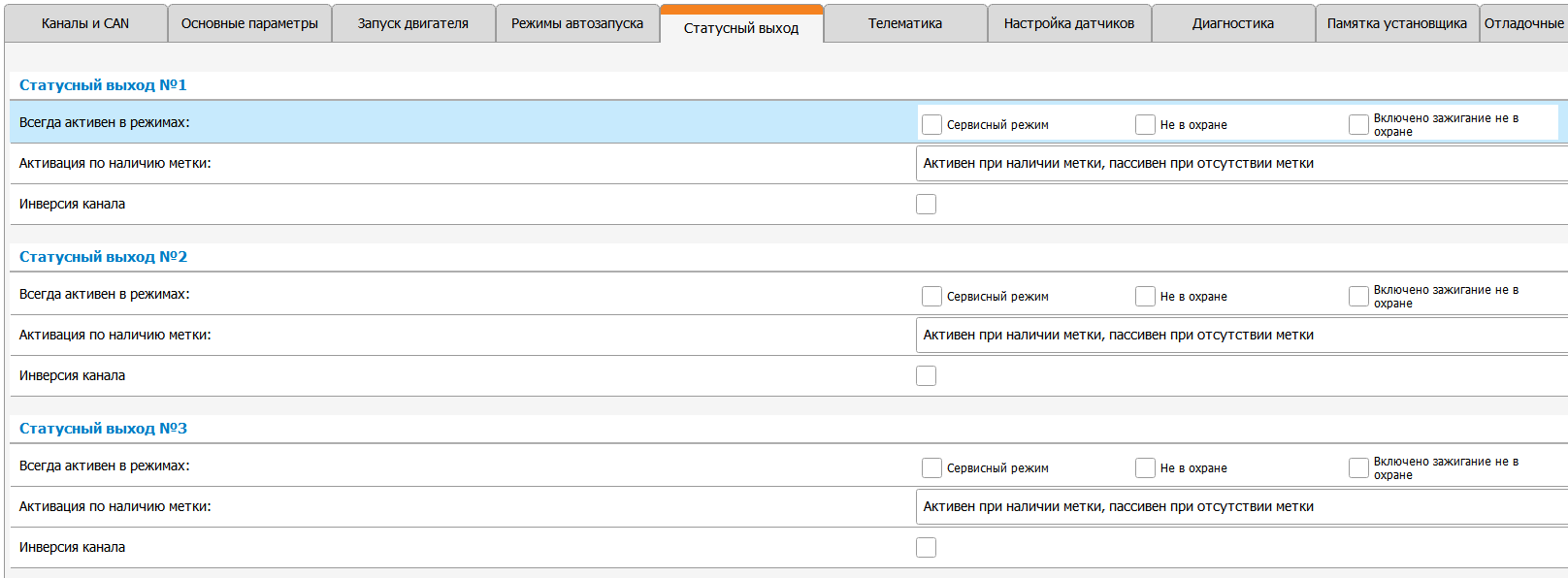

- Активация по наличию метки или по отсутствию метки (настройка)

- Принудительная активация выхода в режимах: не в охране, в сервисе, при включенном зажигании (три настройки)

- Добавлена возможность инверсии выхода

3. Ограничен функционал устройства в сервисном режиме
В сервисном режиме не выполняются следующие команды:
- Постановка или снятие с охраны (управления ЦЗ нет тоже)
- Старт обучения страховой телематики (SMS-команда "КАЛИБРОВКА")
- Запрос OBD-ошибок в CAN (команда с сайта)
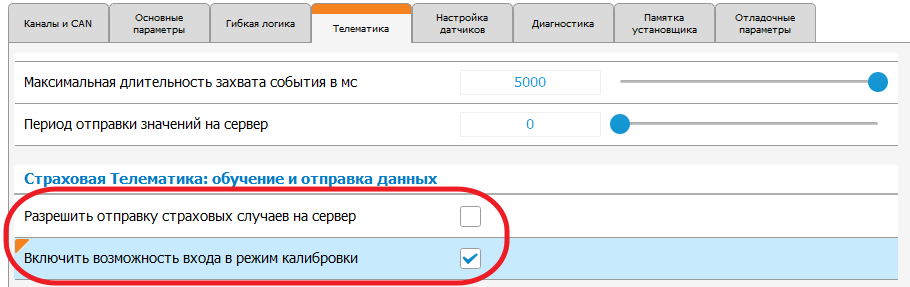
4. Добавлена функция автокалибровки датчика страховой телематики
Функция позволяет автоматически определить расположение корпуса устройства в пространстве для возможности дальнейшего определения качества вождения.
Для включения функции нужно в настройках установить галочки на вкладке "Телематика", как показано на рисунке:
В течение 2-3 часов езды расположение платы будет определено, и на телефон владельца придет SMS:
Положение платы распознано успешно
Исправленные ошибки
- Добавлена задержка отключения блокировки двигателя, если установлена настройка "Блокировать только заведенный двигатель"
- Исправлена ошибка, из-за которой сирена R6 работала при низком напряжении и не работала при нормальном
- Исправлена ошибка в нумерации программ гибкой логики в отправляемых SMS.
Известные ошибки
- Некорректно работают события пересечения порога в гибкой логике, если одновременно настроены два события «больше порога» для одного и того же параметра