1.6.0
Выпущена
- Новые функции
- Добавлена возможность управления состоянием датчиков с брелока
- Добавлена поддержка ГЛОНАСС-GPS модуля с инерциальной навигацией
- Реализовано отключение любого статуса и функции управления автомобиля из CAN
- Показания педали и ручника обрабатываются при выключенном зажигании
- Добавлена команда «запирание багажника»
- Переход в режим настройки по USB возможен только из состояния «Снято с охраны»
- Добавлена функция «Контроль канала связи с брелоком»
- Добавлена поддержка авторизации брелоком
- Добавлено обучение обходчика штатного иммобилайзера
- Добавлен обход штатного иммобилайзера и запуск автомобилей Toyota-Lexus по интерфейсам CAN + RX/TX
- Добавлен выход «Блокировка рулевого вала (SLP)»
- Добавлена настройка «Отключение датчиков на время работы двигателя»
- Изменен алгоритм управления штатной системой охраны и центральным замком при запуске двигателя
- Добавлена настройка «Условие включения GPS-приемника»
- Дополнены настройки системы запуска и способа управления обходом иммобилайзера
- Исправленные ошибки
- Известные ошибки
Новые функции
| Функция | X96 | M96 | M66 |
|---|---|---|---|
| Добавлена возможность управления состоянием датчиков с брелока | ● | ||
| Добавлена поддержка ГЛОНАСС-GPS модуля с инерциальной навигацией | ● | ● | |
| Реализовано отключение любого статуса и функции управления автомобиля из CAN | ● | ● | ● |
| Показания педали и ручника обрабатываются при выключенном зажигании | ● | ● | |
| Добавлена команда «запирание багажника» | ● | ● | |
| Переход в режим настройки по USB возможен только из состояния «Снято с охраны» | ● | ● | ● |
| Добавлена функция «Контроль канала связи с брелоком» | ● | ||
| Добавлена поддержка авторизации брелоком | ● | ||
| Добавлено обучение обходчика штатного иммобилайзера | ● | ● | |
| Добавлен обход штатного иммобилайзера и запуск автомобилей Toyota-Lexus по интерфейсам CAN + RX/TX | ● | ● | |
| Добавлен выход «Блокировка рулевого вала (SLP)» | ● | ● | |
| Добавлена настройка «Отключение датчиков на время работы двигателя» | ● | ● | |
| Изменен алгоритм управления штатной системой охраны и центральным замком при запуске двигателя | ● | ● | |
| Добавлена настройка «Условие включения GPS-приемника» | ● | ● | ● |
| Дополнены настройки системы запуска и способа управления обходом иммобилайзера | ● | ● |
Добавлена возможность управления состоянием датчиков с брелока
X96
Последовательное нажатие кнопок брелока 1+2 приводит к включению/отключению обоих датчиков удара.
Последовательное нажатие кнопок брелока 1+3 приводит к включению/отключению датчиков движения и наклона.
Добавлена поддержка ГЛОНАСС-GPS модуля с инерциальной навигацией
X96 M96
Модуль ГЛОНАСС-GPS c инерциальной навигацией N-11 обеспечивает более высокую точность определения координат, в том числе в закрытых пространствах: паркингах или туннелях.
При подключении модуля GPS комплекс автоматически определяет тип подключенного модуля, поэтому изменение настроек не требуется.
Для работы инерциальной навигации в Вашем автомобиле должен поддерживаться статус CAN «скорость» (см. www.can.starline.ru). Если этот статус не поддерживается, то модуль N-11 будет работать как обычный ГЛОНАСС-GPS.
Реализовано отключение любого статуса и функции управления автомобиля из CAN
X96 M96 M66
Отключить ненужные функции управления или статусы, доступные в CAN-шине, можно в настройках через Starline Master, включая:
- опрос штатных кнопок
- скорость
- уровень топлива
- ошибки OBD2
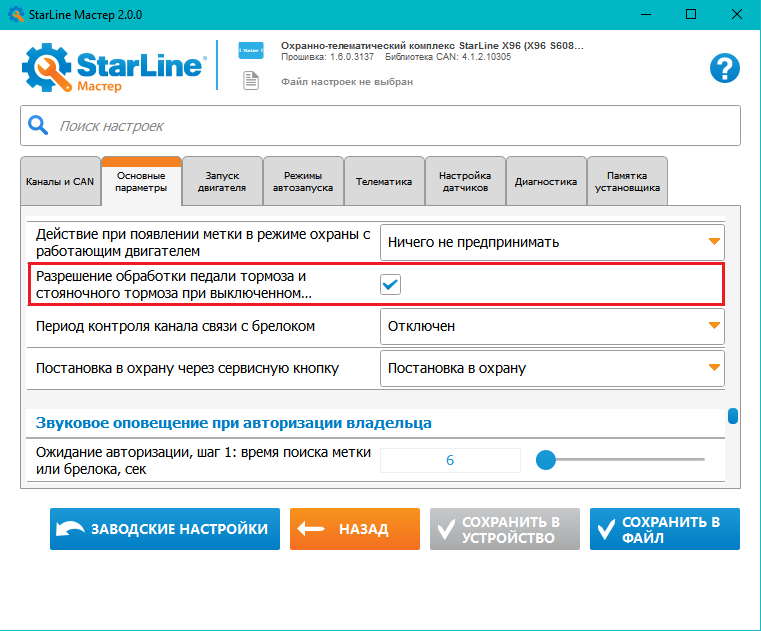
Показания педали и ручника обрабатываются при выключенном зажигании
X96 M96
Добавлена настройка «Разрешение обработки педали тормоза и стояночного тормоза при выключенном зажигании".
Если в автомобиле сигналы педали тормоза и стояночного тормоза присутствуют при выключенном зажигании, то настройку нужно активировать.
Добавлена команда «запирание багажника»
X96 M96
Если в машине поддерживается запирание багажника по CAN, то комплекс будет запирать багажник при подаче команды на отпирание багажника при открытом багажнике
Переход в режим настройки по USB возможен только из состояния «Снято с охраны»
X96 M96 M66
В состоянии «снято с охраны» при правильном вводе сервисного кода через StarLine Мастер комплекс входит в режим изменения настроек комплекса.
Если в "снято" вводится неверный сервисный код, то выводится сообщение, в котором указано сколько осталось попыток.
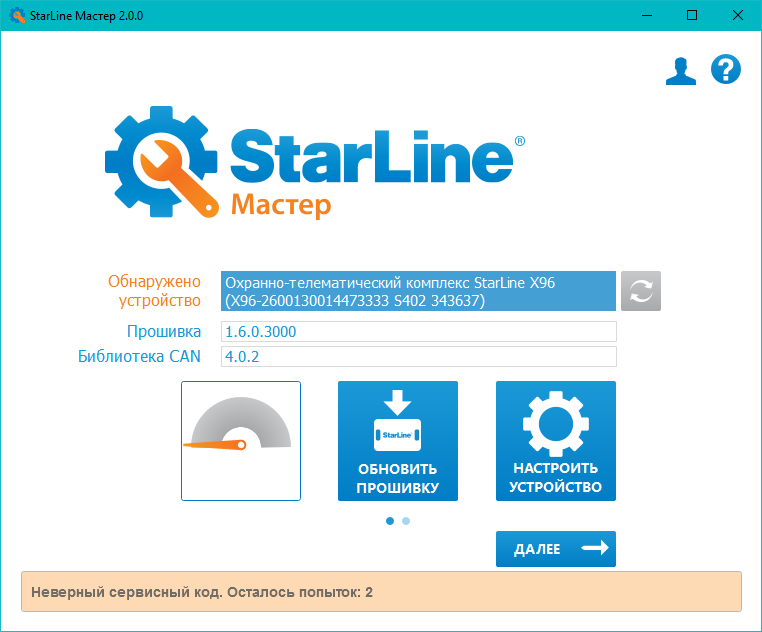
Если все попытки исчерпаны, то в сообщении указывается время, на которое ввод сервисного кода заблокирован.

В других состояниях (сервисный режим, ожидание авторизации владельца, запрет поездки, охрана, тревога) комплекс выдает ошибку с указанием текущего режима, независимо от того правильно ли был введен сервисный код.

Для удобства настройки при установке комплекса допускается повторный вход в режим настроек из любого состояния, если с момента последнего входа в настройки прошло не более одного часа или кабель USB не отключался.
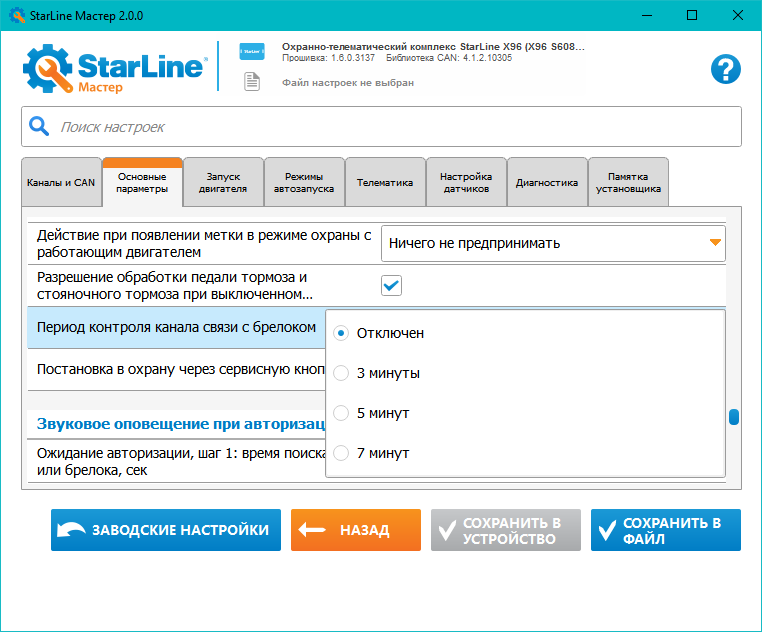
Добавлена функция «Контроль канала связи с брелоком»
X96
Для использования этой функции необходимо обновить ПО ЖКИ брелока до версии не ниже 1.6.0.
Период контроля канала можно настроить как через StarLine Мастер, так и с брелока.
Настройка с брелока описана в соответствующей инструкции: X96 → Управление комплексом с помощью брелока
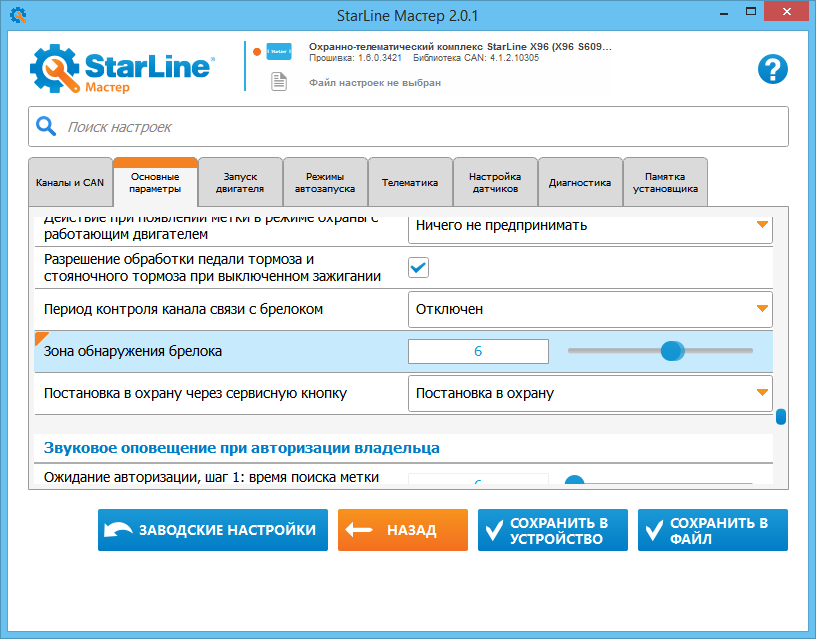
В StarLine Мастер настройка находится во вкладке Основные параметры в группе Режимы работы сигнализации и называется Период контроля канала связи с брелоком.
Функция активна только в режиме охраны и при условии, что заряд батарейки брелока не ниже порогового.
Если брелок вовремя не получает служебное сообщение от основного блока, то он вибрирует и проигрывает мелодичный звуковой сигнал:
Если сообщения не будут приходить и дальше, то индикация потери связи будет повторяться с периодом контроля канала еще два раза. Неудачная попытка выполнить любую команду с брелока приведет к отключению индикации потери связи. При потере связи на дисплее будет мигать антенна с одной палочкой в левом верхнем углу.
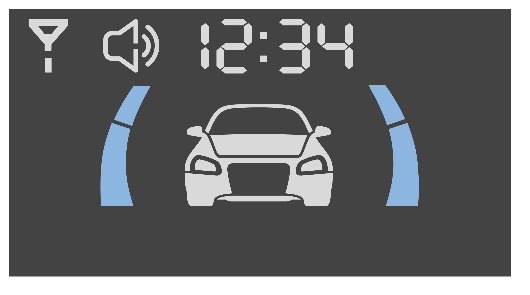
После успешного выполнения команды или получения статуса от основного блока уровень качества связи индицируется антенной с соответствующим количеством палочек.
Уровень громкости звукового сигнала, оповещающего о потере связи, можно настроить через меню звуковых профилей брелока, работа с которым описана в инструкции: X96 → Управление комплексом с помощью брелока. Там же можно включить или отключить вибрацию.
Добавлена поддержка авторизации брелоком
X96
Для использования этой функции необходимо обновить ПО ЖКИ брелока до версии не ниже 1.6.0.
Для активации функции необходимо во вкладке Основные параметры включить настройку Авторизация владельца: брелок:
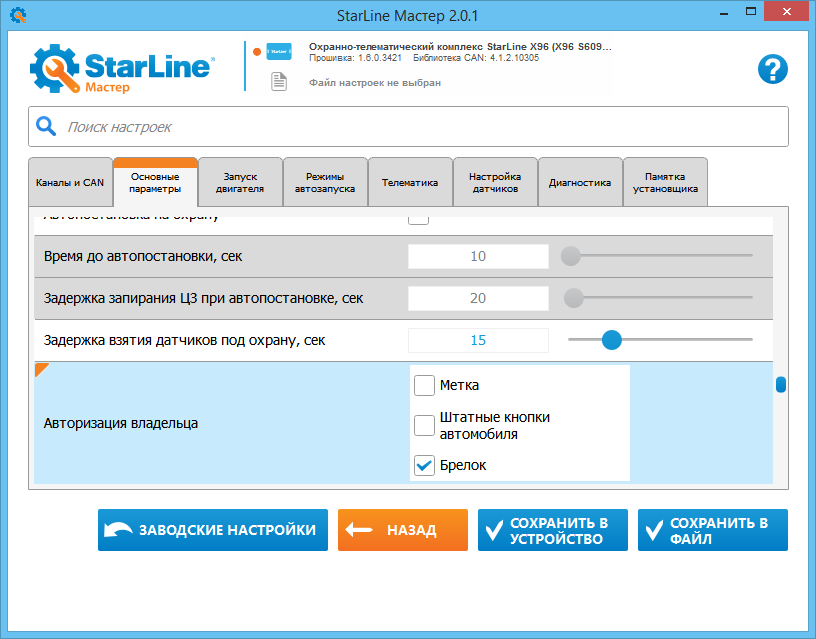
Также необходимо подобрать значение настройки Зона обнаружения брелока:
Состояние «Ожидание авторизации владельца» на брелоке отображается следующим образом:
Добавлено обучение обходчика штатного иммобилайзера
X96 M96
Для реализации обхода штатного иммобилайзера средствами комплекса автомобиль должен поддерживать соответствующую функцию (смотрите на can.starline.ru).
Вход в режим обучения производится 14 нажатиями сервисной кнопки и включением зажигания в режиме «снято с охраны».
Вход подтверждается 14 синхронными вспышками светодиода и звуковыми сигналами звукового излучателя, потом короткой двойной вспышкой светодиода и двумя короткими звуковыми сигналами.
Если обучение прошло успешно, последует короткая двойная вспышка светодиода и два коротких звуковых сигнала, в случае неудачи последует одна длинная вспышка светодиода и один длинный звуковой сигнал встроенным звукоизлучателем.
Добавлен обход штатного иммобилайзера и запуск автомобилей Toyota-Lexus по интерфейсам CAN + RX/TX
X96 M96
Для реализации обхода штатного иммобилайзера и запуска двигателя средствами комплекса автомобиль должен поддерживать соответствующую функцию (смотрите на can.starline.ru).
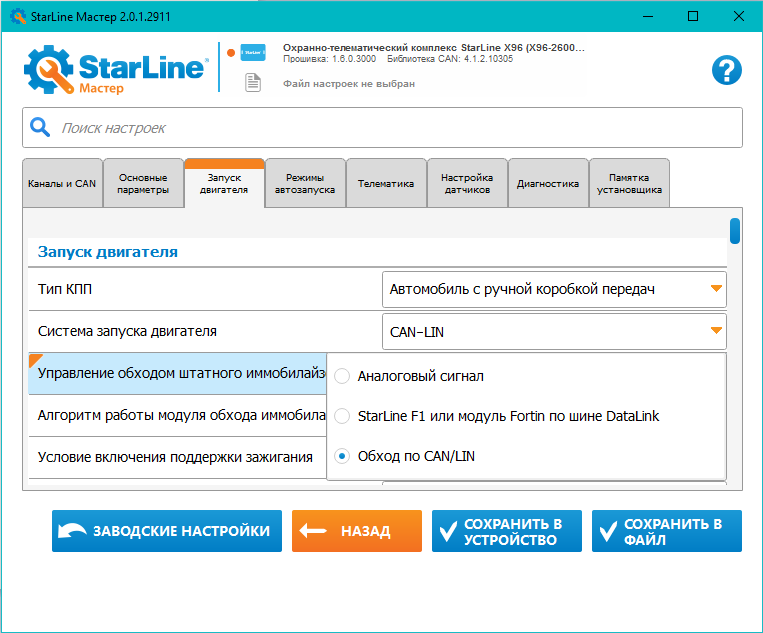
Необходимо выбрать следующие настройки:
Отметки в таблице статусов CAN (см. ниже) устанавливаются автоматически при выборе соответствующей настройки на предыдущем шаге и используются только для отображения того, что на данном автомобиле функция поддерживается.
Далее нужно выполнить следующие подключения:
Для М96:
- Подключить фиолетовый провод разъёма XS1 к шине данных RX в автомобиле
- Подключить сине-красный провод (функция LIN назначается автоматически при выборе автомобиля в настройках CAN) к шине данных TX в автомобиле
- Если требуется, назначить на любой свободный выход функцию «Блокировка рулевого вала (SLP)» и подключить к проводу SLP в автомобиле
Точки подключения смотрите на can.starline.ru
Для Х96:
- Подключить средний черный провод четырехжильного шлейфа (красный + 3 черных) от разъёма XS3 к шине данных RX в автомобиле
- Подключить сине-чёрный провод разъема XS2 (фукнция LIN назначается автоматически при выборе автомобиля в настройках CAN) разъёма XS2:9 к шине данных TX в автомобиле
- Если требуется, назначить на любой свободный выход функцию «Блокировка рулевого вала (SLP)» и подключить к проводу SLP в автомобиле
Точки подключения смотрите на can.starline.ru
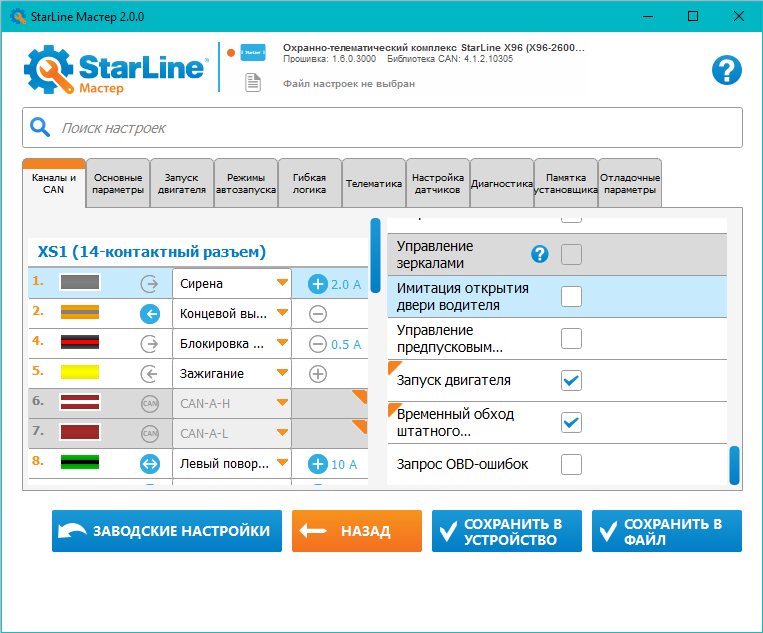
Добавлен выход «Блокировка рулевого вала (SLP)»
X96 M96
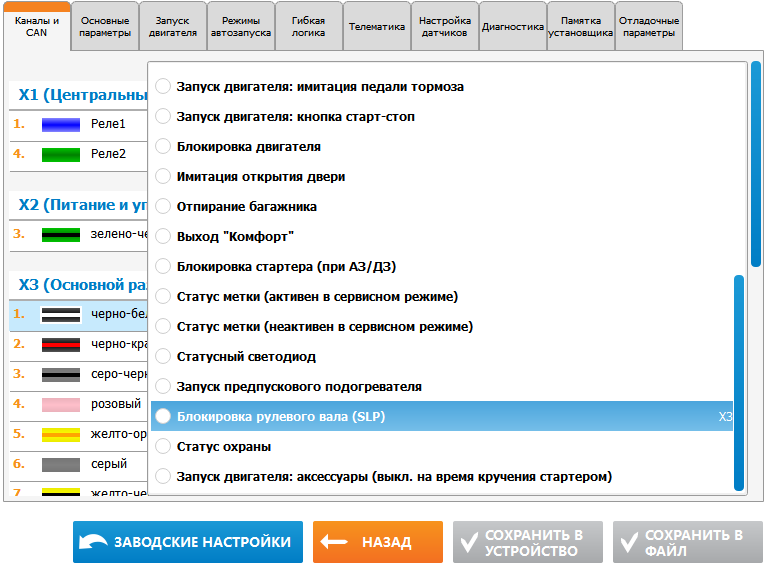
Если в настройке Система запуска двигателя выбран вариант Управление запуском по CAN-LIN, то этот выход:
- активируется после того, как включилось зажигание при автозапуске
- деактивируется при выключении зажигания или через 10 секунд после того, как двигатель успешно запустился
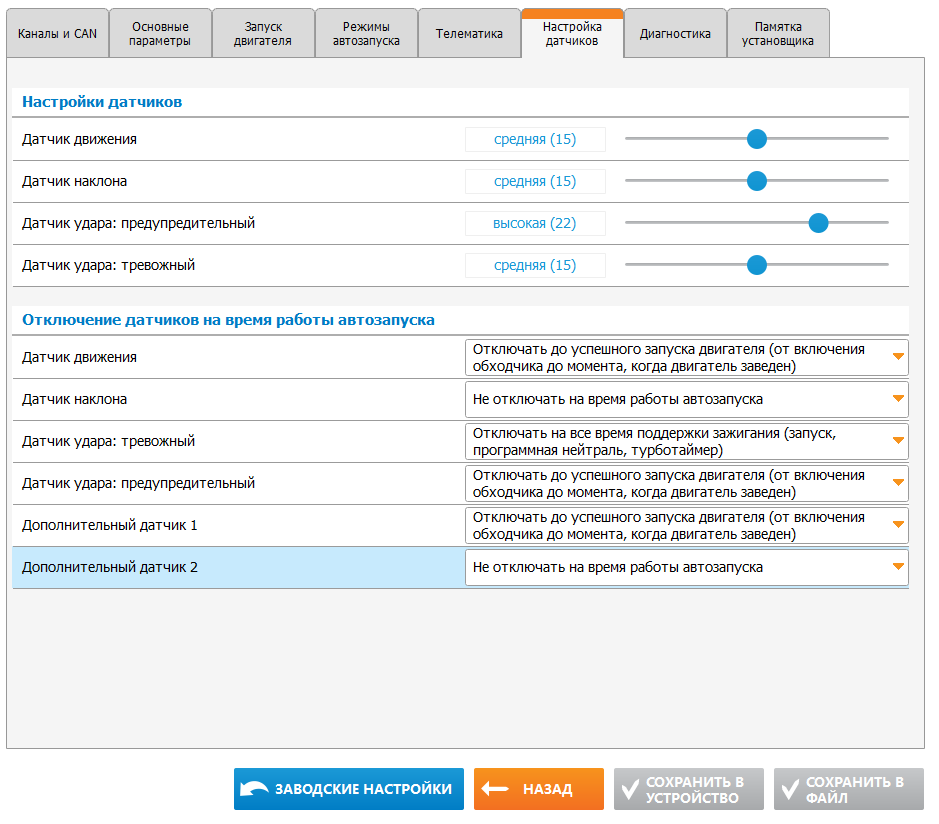
Добавлена настройка «Отключение датчиков на время работы двигателя»
X96 M96
Каждый из датчиков может при необходимости отключаться либо на все время работы двигателя, либо на время самого запуска (вращения стартера) и остановки двигателя.
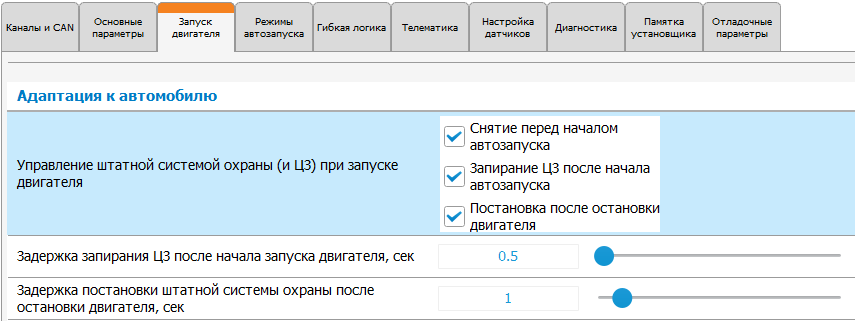
Изменен алгоритм управления штатной системой охраны и центральным замком при запуске двигателя
X96 M96
- Добавлена возможность настроить снятие штатной системы охраны перед началом запуска двигателя
- Отсчет задержки запирания ЦЗ теперь выполняется после начала запуска двигателя
Добавлена настройка «Условие включения GPS-приемника»
X96 M96 M66
При установке ГЛОНАСС-GPS приемника в местах с плохим уровнем приема спутников добавлена возможность включать приемник заранее, чтобы спутники были определены до начала движения. Для этого в разделе Основные настройки добавлена настройка Условие включения GPS-приемника:
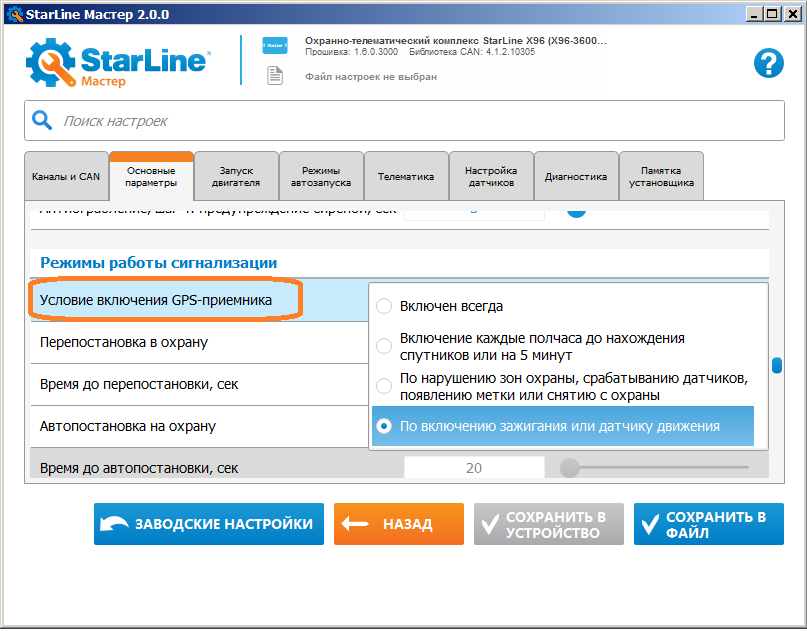
По умолчанию:
- для M66 — Включен всегда
- для X96 и M96 — По включению зажигания или датчику движения
Примечание: GPS дополнительно будет включаться по включению зажигания и по началу движения при любом варианте настройки.
Дополнены настройки системы запуска и способа управления обходом иммобилайзера
X96 M96
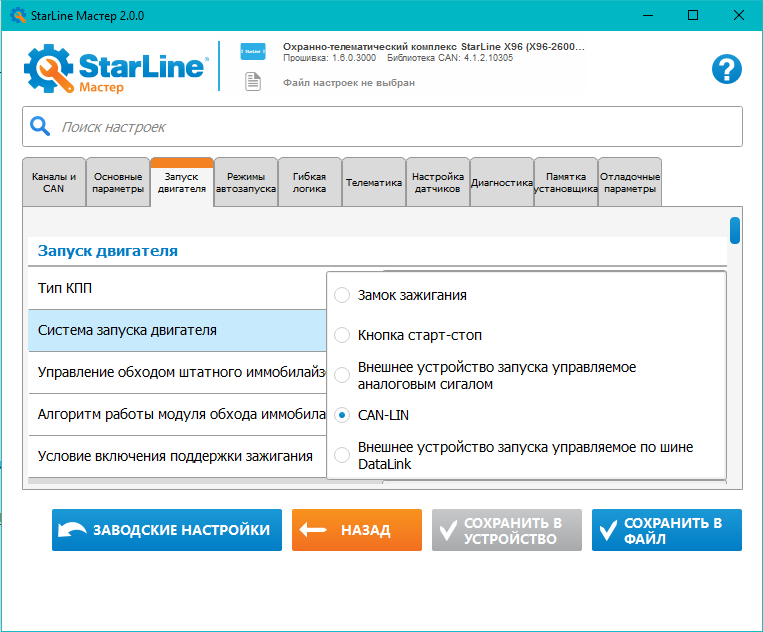
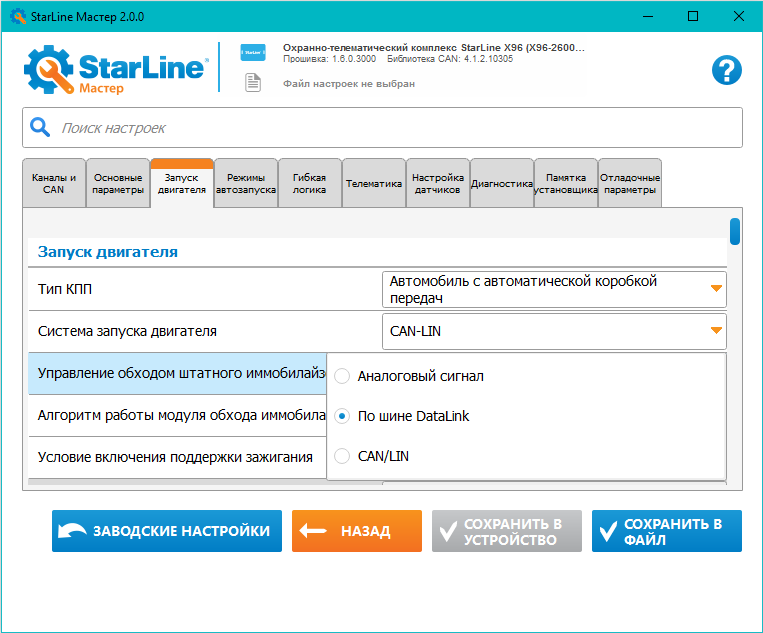
Допустимы следующие сочетания настроек системы запуска и типа управления обходом штатного иммобилайзера:
| Управление обходом штатного иммобилайзера | ||||
| Аналоговый сигнал | CAN/LIN | По шине Datalink | ||
Система запуска | Замок зажигания | да | да | да |
|---|---|---|---|---|
| Кнопка старт-стоп | да | да | да | |
| Внешнее устройство запуска управляемое аналоговым сигналом | да | нет (1) | нет (1) | |
| CAN-LIN | нет (2) | да | нет (2) | |
| Внешнее устройство запуска управляемое по шине Datalink | нет (3) | нет (3) | да | |
- если выбран тип запуска Внешнее устройство запуска аналоговым сигналом, то независимо от выбранного типа управления модулем обхода управление будет производиться «аналоговым сигналом»
- если выбран тип запуска CAN-LIN, то независимо от выбранного типа управления модулем обхода управление будет производиться по CAN-LIN шинам
- если выбран тип запуска По шине DataLink, то независимо от выбранного типа управления модулем обхода управление будет производиться по шине DataLink
Исправленные ошибки
- Улучшен алгоритм фильтрации выбросов GPS-приемника при плохой видимости спутников
- Исправлена ошибка, из-за которой после снятия по свободным рукам могло произойти повторное снятие по аналоговому слейву
- Исправлена ошибка, которая вызывала срабатывание некоторых программ гибкой логики в момент применения настроек в Мастере
- SMS о постановке по свободным рукам с нарушенным периметром отправлялось только при включенной настройке оповещения о тревогах
- Исправлено управление предпусковым подогревателем с сайта: раньше кнопка работала только на включение, теперь — включает, если предпусковой подогреватель не работает; выключает — если работает.
- Исправлена ошибка, из-за которой некорректно отображалась настройка задержки выполнения действия гибкой логики «имитация двери»
Исправлена ошибка, из-за которой в охране с запущенным двигателем могли быть срабатывания предупредительного уровня датчика удара
- Введена дополнительная проверка текста SMS перед отправкой, чтобы избежать в тексте искаженных символов
- Теперь на брелоке время работы двигателя корректно останавливается при вежливой посадке, при глушении двигателя через гибкую логику, а также при неудачной попытке остановки.
Известные ошибки
- При управлении предпусковым подогревателем по CAN формируется сообщение "не удалось запустить подогреватель", даже если он запустился. Также некорректно отображается статус подогревателя и не производится его остановка по таймауту (только командой 220)
- Иногда при запуске двигателя не с первой попытки может не включиться ГЛОНАСС-GPS приемник
- Не работает калибровка страховой телематики
- Дистанционный запуск двигателя работает в сервисном режиме
- Запуск двигателя по CAN работает только при условии, когда CAN-шина не спит
- Иногда возможно ложное определение очень низкой температуры двигателя и выполнение автоматического запуска двигателя в случае, когда температура двигателя берется от реле R6